“Serial TTY overview”的版本间的差异
Zhouyuebiao(讨论 | 贡献) |
|||
| (未显示2个用户的15个中间版本) | |||
| 第1行: | 第1行: | ||
| − | + | 本文提供有关 Linux<sup>®</sup> TTY框架的信息。 它解释了如何激活“”UART“”接口,以及如何从用户和内核空间访问它。<br /> | |
| − | [[ | + | ==Framework purpose== |
| − | + | ||
| − | + | '''TTY'''子系统控制UART设备与使用这些设备的程序之间的通信。 | |
| + | <br/> | ||
| + | TTY子系统负责: | ||
| + | * 控制异步线路上的物理数据流(包括传输速度,字符大小和线路可用性)。 | ||
| + | * 通过识别特殊字符并适应本国语言来解释数据。 | ||
| + | * 通过控制终端的概念来控制作业和终端访问。 | ||
| + | <br/> | ||
| + | '''TTY子系统不支持STM32 USART外设的同步模式。''' | ||
| + | <br/> | ||
| + | 控制终端管理一组进程的输入和输出操作。 TTY特殊文件(ttyX文件系统条目)支持控制终端接口。 | ||
| + | <br/> | ||
| + | 为了执行其任务,TTY子系统由模块(也称为学科)组成。 模块是一组处理规则,它们控制计算机与异步设备之间的通信接口。 可以为每个TTY动态添加和删除模块。 | ||
| + | |||
| + | TTY子系统支持三种主要类型的模块: | ||
| + | * TTY驱动程序:TTY驱动程序或硬件规则直接控制硬件(TTY设备)或伪硬件(PTY设备)。 它们通过为适配器上面的模块提供服务来执行对适配器的实际输入和输出。 打开端口时,这些服务是流控制和特殊语义。 | ||
| + | * 线学科:线学科提供编辑,作业控制和特殊字符解释。 它们执行入站和出站数据流上发生的所有转换。 生产线规程还为TTY驱动程序执行大多数错误处理和状态监视。 | ||
| + | * 转换器模块:转换器模块或映射学科,翻译或映射输入和输出字符。 | ||
| + | <br/> | ||
| + | |||
| + | 从内核4.12版本开始,串行设备总线(也称为Serdev)已在TTY框架中引入,以改善为连接到串行端口的设备(例如:蓝牙,NFC,FM无线电和GPS设备)提供的接口 学科“驾驶员”有一些已知的局限性: | ||
| + | * 设备是在用户空间而不是固件中编码的(ACPI的设备树) | ||
| + | * “驱动程序”不是内核驱动程序,而是用户空间守护程序 | ||
| + | * 内核空间中没有描述相关的资源(GPIO和中断,调节器,时钟,音频接口),这会影响电源管理 | ||
| + | * 打开端口时会注册“驱动程序” | ||
| + | |||
| + | Serdev允许将设备连接到UART,而无需了解线路规则限制: | ||
| + | * 新总线类型:串行 | ||
| + | * Serdev控制器 | ||
| + | * Serdev设备(客户端或从设备) | ||
| + | * Serdev TTY-端口控制器 | ||
| + | ** 仅内核内控制器实现 | ||
| + | ** 定义客户端时,由TTY驱动程序注册 | ||
| + | ** 客户端由固件(设备树或ACPI)描述 | ||
| + | <br/> | ||
| + | |||
| + | STMicroelectronics提供的USART低级驱动程序(“drivers/tty/serial/stm32 USART.c”)支持 | ||
| + | [https://en.wikipedia.org/wiki/RS-232 RS-232] standard (for serial communication transmission of data), and [https://en.wikipedia.org/wiki/RS-485 RS-485] standard (for [https://en.wikipedia.org/wiki/Modbus modbus]协议应用程序为例)。<br/> | ||
| + | Linux<sup>®</sup>低级驱动程序不支持USART同步模式。<br/> | ||
| + | <br/> | ||
| + | 在以下用例中,TTY框架用于访问串行设备: | ||
| + | * Linux启动过程中的“'tty虚拟控制台”' | ||
| + | * '''pts pseudo-terminal'''通过终端访问 | ||
| + | * '''用户空间应用程序''' | ||
| + | |||
| + | ==System overview== | ||
| + | {{ | ||
| + | ImageMap|Image:Serial TTY overview.png{{!}} frame {{!}} center{{!}} Serial TTY architecture overview | ||
| + | rect 261 75 412 116 [[How to use TTY from an application | How to use TTY from an application ]] | ||
| + | rect 452 75 603 116 [[How to use TTY with User Terminal | How to use TTY from a user terminal]] | ||
| + | rect 676 75 828 116 [[Bluetooth_overview#System_overview | Example: Bluetooth_overview ]] | ||
| + | rect 268 130 453 220 [http://man7.org/linux/man-pages/man3/termios.3.html termios] | ||
| + | rect 350 314 502 355 {{CodeSource | Linux kernel | drivers/tty/tty_io.c | tty char driver}} | ||
| + | rect 350 381 502 423 [[Serial TTY line discipline| Line discipline]] | ||
| + | rect 677 439 827 479 {{CodeSource | Linux kernel | drivers/tty/serdev | serdev framework}} | ||
| + | rect 350 439 502 480 {{CodeSource | Linux kernel | drivers/tty | tty framework}} | ||
| + | rect 463 514 615 554 {{CodeSource | Linux kernel | drivers/tty/serial/serial_core.c | serial_core framework}} | ||
| + | rect 463 578 615 620 {{CodeSource | Linux kernel | drivers/tty/serial/stm32-usart.c | stm32-usart driver}} | ||
| + | rect 463 653 615 694 [[USART internal peripheral| USART internal peripheral]] | ||
| + | }} | ||
| + | <br/> | ||
| + | |||
| + | 注意: 在引导过程中,当探测串行设备时,串行框架会将关联的tty终端实例化为虚拟设备。 然后,系统将该tty虚拟设备视为关联的串行设备的子级。 | ||
| + | <br/> | ||
| + | |||
| + | ===Components description=== | ||
| + | ''从客户端应用程序到硬件'' | ||
| + | * 应用程序:客户应用程序,用于从串行端口上连接的外围设备读取/写入数据。 | ||
| + | |||
| + | * [[TTY tools]]: Linux社区提供的工具,例如'''stty''','''ldattach''','''inputattach''','''tty''',''' ttys''',''' agety''',''' mingetty''','''kermit'''和''' minicom'''。 | ||
| + | * Termios: API,提供使用串行驱动程序开发应用程序的接口。 | ||
| + | |||
| + | * 客户端子系统:'''serdev'''内核的内核子系统客户端(示例:[[Bluetooth_overview#System_overview | Bluetooth_overview ]]). | ||
| + | |||
| + | * TTY框架:高层TTY结构管理,包括{{CodeSource | Linux kernel | drivers/tty/tty_io.c | '''tty character device driver'''}}, {{CodeSource | Linux kernel | drivers/tty | '''TTY core functions'''}}, [[Serial TTY line discipline| '''line discipline''']] and {{CodeSource | Linux kernel | drivers/tty/serdev | '''Serdev core functions'''}} management. | ||
| + | |||
| + | * 串行框架:低级串行驱动程序管理,包括{{CodeSource | Linux kernel | drivers/tty/serial/serial_core.c | '''serial core''' functions}}'''低级串行驱动程序''',用于所有STM32系列设备。 | ||
| + | |||
| + | * USART驱动程序:{{CodeSource | Linux kernel | drivers/tty/serial/stm32-usart.c | stm32-usart}} '''low-level serial driver''' 适用于所有STM32系列设备。 | ||
| + | |||
| + | * [[USART internal peripheral| STM32 USART]]: '''STM32前端IP'''通过串行端口连接到外部设备。 | ||
| + | |||
| + | ===APIs description=== | ||
| + | |||
| + | TTY仅向用户空间提供'''字符设备接口'''(命名为/ dev / ttyX)。 | ||
| + | 用户空间TTY客户端应用程序的主要API由便携式POSIX终端接口termios提供,该终端依赖于/ dev / ttyX接口进行TTY链接配置。<br/> | ||
| + | |||
| + | <ref>[http://man7.org/linux/man-pages/man3/termios.3.html termios API], Linux Programmer's Manual termios API Documentation (user land API with serial devices)</ref> 是一个用户区域API,它的功能描述了用于控制异步通信端口的通用终端接口。<br/> | ||
| + | |||
| + | POSIX termios API抽象化了硬件的低级细节,并提供了一个简单而完整的编程接口,可用于高级项目。 它是'''character device API'''<ref> [https://bootlin.com/doc/legacy/accessing-hardware/accessing-hardware.pdf Character device API overview], ''Accessing hardware from userspace'' training, Bootlin documentation</ref> ioctl操作。<br/> | ||
| + | |||
| + | 注意: | ||
| + | 如果在内核级别需要串行接口(例如,通过内核驱动程序通过U(S)ART控制外部设备),则客户可以使用 [[Serial TTY line discipline|'''line discipline''']] 或“ Serdev”客户端。 <br/> | ||
| + | * '''学科'''将负责: | ||
| + | ** 创建这个新的内核API | ||
| + | ** 在串行内核和新内核API之间路由数据流<br/> | ||
| + | *'''Serdev'''提供了内核驱动程序的接口。 | ||
| + | **此界面类似于线路规则操作:打开和关闭,终端设置,写入,调制解调器控制,读取(回调)和写入唤醒(回调) | ||
| + | |||
| + | ==Configuration== | ||
| + | |||
| + | 本节介绍如何在串行端口上配置设备。 | ||
| + | |||
| + | ===Kernel Configuration=== | ||
| + | 默认情况下,ST交付中会激活串行驱动程序,串行框架和TTY框架。 但是,如果需要特定的配置,则本节说明如何在内核中激活/停用IIO。 | ||
| + | |||
| + | 使用Linux[[Menuconfig or how to configure kernel | Menuconfig ]] 工具。 | ||
| + | |||
| + | 对于TTY,选择: | ||
| + | <pre> | ||
| + | Device Drivers ---> | ||
| + | Character devices ---> | ||
| + | [*] Enable TTY | ||
| + | |||
| + | 允许删除可节省空间的TTY支持,并阻止需要TTY的功能包含在内核中。 | ||
| + | 任何文本终端或串行端口通信都需要TTY。 大多数用户应启用此功能。 | ||
| + | </pre> | ||
| + | |||
| + | 对于STM32串行驱动程序,选择: | ||
| + | <pre> | ||
| + | Device Drivers ---> | ||
| + | Character devices ---> | ||
| + | Serial drivers ---> | ||
| + | <*> STMicroelectronics STM32 serial port support | ||
| + | [*] Support for console on STM32 | ||
| + | |||
| + | 该驱动程序用于STMicroelectronics STM32 MCU上的片上串行控制器。 | ||
| + | USART支持Rx和Tx功能。它支持所有行业标准的波特率。</pre> | ||
| + | |||
| + | ===Device tree configuration === | ||
| + | 专用文章[[Serial TTY device tree configuration|Serial TTY device tree configuration]]中描述了由于设备树而导致的UART配置。 | ||
| + | |||
| + | ==How to use TTY== | ||
| + | 本节基于以下两个用例,描述如何从用户区域(从终端或应用程序)以及内核空间使用TTY: | ||
| + | * 如何使用termios结构配置串行端口 | ||
| + | * 如何发送/接收数据 | ||
| + | |||
| + | termios结构允许使用许多设置来配置通信端口,例如: | ||
| + | * Baud rate | ||
| + | * Character size mask | ||
| + | * Parity bit enabling | ||
| + | * Parity and framing errors detection settings | ||
| + | * Start/stop input and output control | ||
| + | * RTS/CTS (hardware) flow control | ||
| + | * ... | ||
| + | |||
| + | 由于[[USART internal peripheral]] 支持7、8和9个字长的数据,因此支持以下termios字符大小和奇偶校验位配置: | ||
| + | <span id{{=}}"CSIZE_configurations"></span> | ||
| + | * CS6 with parity bit | ||
| + | * CS7 with or without parity bit | ||
| + | * CS8 with or without parity bit | ||
| + | |||
| + | 使用TTY的提示: | ||
| + | * '''如何从用户终端使用TTY''':专用文章中介绍了用户终端的TTY使用情况, [[How to use TTY with User Terminal|How to use TTY from a user terminal]] | ||
| + | * '''如何在应用程序中使用TTY''':专用文章[[How_to_use_TTY_from_an_application|How to use TTY from an application]]中描述了应用程序的TTY使用情况 | ||
| + | * '''TTY线路规程''':TTY线路规程在专门的文章中描述,[[Serial TTY line discipline|Serial TTY line discipline]] | ||
| + | |||
| + | ==How to trace and debug the framework== | ||
| + | |||
| + | === How to monitor === | ||
| + | 由于Debugfs不提供有关串行或TTY框架的任何信息,因此监视串行和TTY框架的方法是使用 [[Dmesg_and_Linux_kernel_log]] 文章中所述的linux内核日志方法(基于printk)。 | ||
| + | |||
| + | === How to trace === | ||
| + | ==== Kernel boot log ==== | ||
| + | 以下'''内核启动日志'''摘录显示了已正确探测的串行驱动程序: | ||
| + | |||
| + | <pre> | ||
| + | [ 0.793340] STM32 USART driver initialized | ||
| + | [ 0.798779] 4000f000.serial: ttySTM1 at MMIO 0x4000f000 (irq = 25, base_baud = 4000000) is a stm32-usart | ||
| + | [ 0.808875] stm32-usart 4000f000.serial: interrupt mode used for rx (no dma) | ||
| + | [ 0.816106] stm32-usart 4000f000.serial: interrupt mode used for tx (no dma) | ||
| + | [ 0.824253] 40010000.serial: ttySTM0 at MMIO 0x40010000 (irq = 27, base_baud = 4000000) is a stm32-usart | ||
| + | [ 0.833796] console [ttySTM0] enabled | ||
| + | [ 0.833796] console [ttySTM0] enabled | ||
| + | [ 0.840862] bootconsole [earlycon0] disabled | ||
| + | [ 0.840862] bootconsole [earlycon0] disabled | ||
| + | [ 0.850132] stm32-usart 40010000.serial: interrupt mode used for rx (no dma) | ||
| + | [ 0.855755] stm32-usart 40010000.serial: interrupt mode used for tx (no dma) | ||
| + | </pre> | ||
| + | |||
| + | ==== dmesg output information ==== | ||
| + | 系统日志显示在探测期间注册的UART设备和相关的TTY端子。 | ||
| + | {{Board$}} dmesg | grep ttySTM* | ||
| + | [ 0.000000] Kernel command line: root=/dev/mmcblk0p5 rootwait rw earlyprintk console=ttySTM1,115200 | ||
| + | {{highlight|# ttySTM1 terminal is associated with usart3 (4000f000.serial) #}} | ||
| + | [ 0.798779] 4000f000.serial: {{Green|'''ttySTM1'''}} at MMIO 0x4000f000 (irq = 25, base_baud = 4000000) is a stm32-usart | ||
| + | {{highlight|# ttySTM0 terminal is associated with uart4 (40010000.serial) for console#}} | ||
| + | [ 0.824253] 40010000.serial: {{Green|'''ttySTM0'''}} at MMIO 0x40010000 (irq = 27, base_baud = 4000000) is a stm32-usart | ||
| + | {{highlight|# ttySTM0 terminal is activated by default for console #}} | ||
| + | [ 0.833796] console [{{Green|'''ttySTM0'''}}] enabled | ||
| + | |||
| + | ==== Dynamic trace ==== | ||
| + | 详细的动态跟踪可在[[How to use the kernel dynamic debug]]中找到。<br/> | ||
| + | {{Board$}} echo "file drivers/tty/* +p" > /sys/kernel/debug/dynamic_debug/control | ||
| + | 此命令在运行时启用与TTY内核和驱动程序相关的所有跟踪。<br/> | ||
| + | 通过仅选择要跟踪的文件,可以进行更好的选择。<br/> | ||
| + | |||
| + | {{Info|提醒:需要通过控制台使用引导参数或“ dmesg -n 8”命令将“ loglevel”增加到8}} | ||
| + | |||
| + | === How to debug === | ||
| + | 在实例化TTY串行端口时,TTY内核通过devfs,sysfs和procfs导出不同的文件。 | ||
| + | |||
| + | ====devfs==== | ||
| + | * 存储库'''/ dev'''包含所有探查的TTY串行设备。 | ||
| + | |||
| + | {{Board$}} ls /dev/ttySTM* | ||
| + | {{highlight|# ttySTM1 and ttySTM0 terminals are probed #}} | ||
| + | /dev/{{Green|'''ttySTM1'''}} /dev/{{Green|'''ttySTM0'''}} | ||
| + | |||
| + | ====sysfs==== | ||
| + | * '''/ sys / class / tty /'''列出了ttySx对应于串行端口设备的所有TTY设备。 | ||
| + | {{Board$}} ls /sys/class/tty/*/device/driver | ||
| + | /sys/class/tty/{{Green|'''ttySTM1'''}}/device/driver -> ../../../../bus/platform/drivers/{{Green|'''stm32-usart'''}} | ||
| + | /sys/class/tty/{{Green|'''ttySTM0'''}}/device/driver -> ../../../../bus/platform/drivers/{{Green|'''stm32-usart'''}} | ||
| + | |||
| + | * '''/ sys / devices / platform / soc /'''列出所有探测到的usart设备 | ||
| + | |||
| + | {{Board$}} ls -d /sys/devices/platform/soc/*.serial | ||
| + | {{highlight|# Serial devices 4000f000.serial (usart3) and 40010000.serial (uart4) are probed #}} | ||
| + | /sys/devices/platform/soc/{{Green|'''4000f000.serial'''}} /sys/devices/platform/soc/{{Green|'''40010000.serial'''}} | ||
| + | |||
| + | * '''/sys/devices/platform/soc/''device''.serial/tty'''列出与串行设备关联的TTY终端 | ||
| + | |||
| + | {{Board$}} ls /sys/devices/platform/soc/{{Green|'''4000f000.serial'''}}/tty/ | ||
| + | {{highlight|# ttySTM1 is associated to serial device 4000f000.serial (usart3) #}} | ||
| + | {{Green|'''ttySTM1'''}} | ||
| + | |||
| + | ====procfs==== | ||
| + | * 仓库'''/ proc / device-tree'''列出了在设备树中声明的所有usart设备,包括禁用的设备。 | ||
| + | {{Board$}} ls -d /proc/device-tree/soc/serial@* | ||
| + | /proc/device-tree/soc/serial@4000e000 /proc/device-tree/soc/serial@40010000 /proc/device- | ||
| + | tree/soc/serial@40018000 /proc/device-tree/soc/serial@44003000 | ||
| + | /proc/device-tree/soc/serial@4000f000 /proc/device-tree/soc/serial@40011000 /proc/device- | ||
| + | tree/soc/serial@40019000 /proc/device-tree/soc/serial@5c000000 | ||
| + | |||
| + | 然后,对于列出的每个设备,设备树属性均可用。 | ||
| + | {{Board$}} ls /proc/device-tree/soc/serial@40010000/ | ||
| + | clock-names compatible interrupts-extended name pinctrl-0 pinctrl-names reg wakeup-source | ||
| + | clocks interrupt-names linux,phandle phandle pinctrl-1 power-domains status | ||
| + | |||
| + | :例如,状态条目提供设备树节点中设备的状态。 | ||
| + | |||
| + | {{Board$}} cat /proc/device-tree/soc/{{Green|'''serial@40010000'''}}/status | ||
| + | {{highlight|# status of device serial@40010000 (uart4) is set to "okay" in the device tree #}} | ||
| + | {{Green|'''okay'''}} | ||
| + | |||
| + | |||
| + | * 文件'''/ proc / interrupts'''列出了活动串行端口的中断。 | ||
| + | {{Board$}} cat /proc/interrupts | grep serial | ||
| + | 26: 0 0 GIC-0 71 Level 4000f000.serial | ||
| + | 27: 0 0 stm32-exti-h 28 Edge 4000f000.serial | ||
| + | 28: 13509 0 GIC-0 84 Level 40010000.serial | ||
| + | 29: 0 0 stm32-exti-h 30 Edge 40010000.serial | ||
| + | |||
| + | |||
| + | <span id{{=}}"procfs_serialcounters"></span> | ||
| + | * 文件'''/ proc / tty / driver / stm32-usart'''列出了每个串行实例的串行核心计数器和调制解调器信息。 | ||
| + | |||
| + | :驱动程序信息: | ||
| + | :* serial driver name | ||
| + | :* serial device start address | ||
| + | :* irq number | ||
| + | |||
| + | :计数器: | ||
| + | :* tx: Number of bytes sent | ||
| + | :* rx: Number of bytes received | ||
| + | :* fe: Number of framing errors received | ||
| + | :* pe: Number of parity errors received | ||
| + | :* brk: Number of break signals received | ||
| + | :* oe: Number of overrun errors received | ||
| + | :* bo: Number of framework buffer overrun errors received | ||
| + | |||
| + | :调制解调器信息: | ||
| + | :* RTS: Request To Send | ||
| + | :* CTS: Clear To Send | ||
| + | :* DTR: Data Terminal Ready | ||
| + | :* DSR: Data Set Ready | ||
| + | :* CD: Carrier Detect | ||
| + | :* RI: Ring Indicator | ||
| + | |||
| + | {{Board$}} cat /proc/tty/driver/stm32-usart | ||
| + | serinfo:1.0 driver revision: | ||
| + | 0: uart:stm32-usart mmio:0x40010000 irq:29 tx:22722 rx:2276 RTS|CTS|DTR|DSR|CD | ||
| + | 1: uart:stm32-usart mmio:0x4000F000 irq:27 tx:0 rx:1149 fe:121 oe:2 pe:296 brk:3 RTS|CTS|DTR|DSR|CD | ||
| + | 3: uart:stm32-usart mmio:0x4000E000 irq:25 tx:0 rx:0 CTS|DSR|CD | ||
| + | |||
| + | ==How to go further== | ||
| + | Linux社区提供了许多有关Linux串行/ TTY的详细文档。 请在下面找到最相关的选项: | ||
| + | * Linux Serial-HOWTO <ref>[http://tldp.org/HOWTO/Serial-HOWTO.html Linux Serial-HOWTO], tdlp.org training document, describes how to set up serial ports from both hardware and software perspectives</ref> 从硬件和软件角度描述了如何设置串行端口。 | ||
| + | |||
| + | * POSIX兼容操作系统的串行编程指南<ref>[https://www.cmrr.umn.edu/~strupp/serial.html Serial Programming Guide for POSIX Compliant Operating Systems], by Michael Sweet, training document</ref> , 作者:Michael Sweet。 | ||
| + | |||
| + | |||
| + | 可以在以下Web文章中找到更多信息,以更好地了解Linux TTY框架: | ||
| + | * TTY子系统 <ref> [https://www.ibm.com/support/knowledgecenter/en/ssw_aix_71/com.ibm.aix.genprogc/ttysys.htm TTY Subsystem], by IBM </ref>,由IBM | ||
| + | * TTY揭密 <ref>[http://www.linusakesson.net/programming/tty/ The TTY demystified] TTY subsystem presentation article, by Linus Akesson </ref>, 作者Linus Akesson | ||
| + | * 串行驱动程序培训 <ref>[http://bootlin.com/doc/legacy/serial-drivers/linux-serial-drivers.pdf Linux serial drivers training] Linux Serial Drivers training, by Bootlin </ref>, 作者 Bootlin | ||
| + | * Linux串行驱动程序 <ref>[http://www.linux.it/~rubini/docs/serial/serial.html Linux Serial Drivers] Serial drivers article describing data flows, by Alessandro Rubini</ref>, 作者 Alessandro Rubini | ||
| + | * 串行设备总线<ref>[https://elinux.org/images/0/0e/Serdev-elce-2017-2.pdf The Serial Device Bus] Serdev framework presentation, by Johan Hovold</ref>,作者 Johan Hovold | ||
| + | |||
| + | ==References== | ||
| + | <references /> | ||
2020年11月11日 (三) 12:37的最新版本
本文提供有关 Linux® TTY框架的信息。 它解释了如何激活“”UART“”接口,以及如何从用户和内核空间访问它。
目录
Framework purpose
TTY子系统控制UART设备与使用这些设备的程序之间的通信。
TTY子系统负责:
- 控制异步线路上的物理数据流(包括传输速度,字符大小和线路可用性)。
- 通过识别特殊字符并适应本国语言来解释数据。
- 通过控制终端的概念来控制作业和终端访问。
TTY子系统不支持STM32 USART外设的同步模式。
控制终端管理一组进程的输入和输出操作。 TTY特殊文件(ttyX文件系统条目)支持控制终端接口。
为了执行其任务,TTY子系统由模块(也称为学科)组成。 模块是一组处理规则,它们控制计算机与异步设备之间的通信接口。 可以为每个TTY动态添加和删除模块。
TTY子系统支持三种主要类型的模块:
- TTY驱动程序:TTY驱动程序或硬件规则直接控制硬件(TTY设备)或伪硬件(PTY设备)。 它们通过为适配器上面的模块提供服务来执行对适配器的实际输入和输出。 打开端口时,这些服务是流控制和特殊语义。
- 线学科:线学科提供编辑,作业控制和特殊字符解释。 它们执行入站和出站数据流上发生的所有转换。 生产线规程还为TTY驱动程序执行大多数错误处理和状态监视。
- 转换器模块:转换器模块或映射学科,翻译或映射输入和输出字符。
从内核4.12版本开始,串行设备总线(也称为Serdev)已在TTY框架中引入,以改善为连接到串行端口的设备(例如:蓝牙,NFC,FM无线电和GPS设备)提供的接口 学科“驾驶员”有一些已知的局限性:
- 设备是在用户空间而不是固件中编码的(ACPI的设备树)
- “驱动程序”不是内核驱动程序,而是用户空间守护程序
- 内核空间中没有描述相关的资源(GPIO和中断,调节器,时钟,音频接口),这会影响电源管理
- 打开端口时会注册“驱动程序”
Serdev允许将设备连接到UART,而无需了解线路规则限制:
- 新总线类型:串行
- Serdev控制器
- Serdev设备(客户端或从设备)
- Serdev TTY-端口控制器
- 仅内核内控制器实现
- 定义客户端时,由TTY驱动程序注册
- 客户端由固件(设备树或ACPI)描述
STMicroelectronics提供的USART低级驱动程序(“drivers/tty/serial/stm32 USART.c”)支持
RS-232 standard (for serial communication transmission of data), and RS-485 standard (for modbus协议应用程序为例)。
Linux®低级驱动程序不支持USART同步模式。
在以下用例中,TTY框架用于访问串行设备:
- Linux启动过程中的“'tty虚拟控制台”'
- pts pseudo-terminal通过终端访问
- 用户空间应用程序
System overview
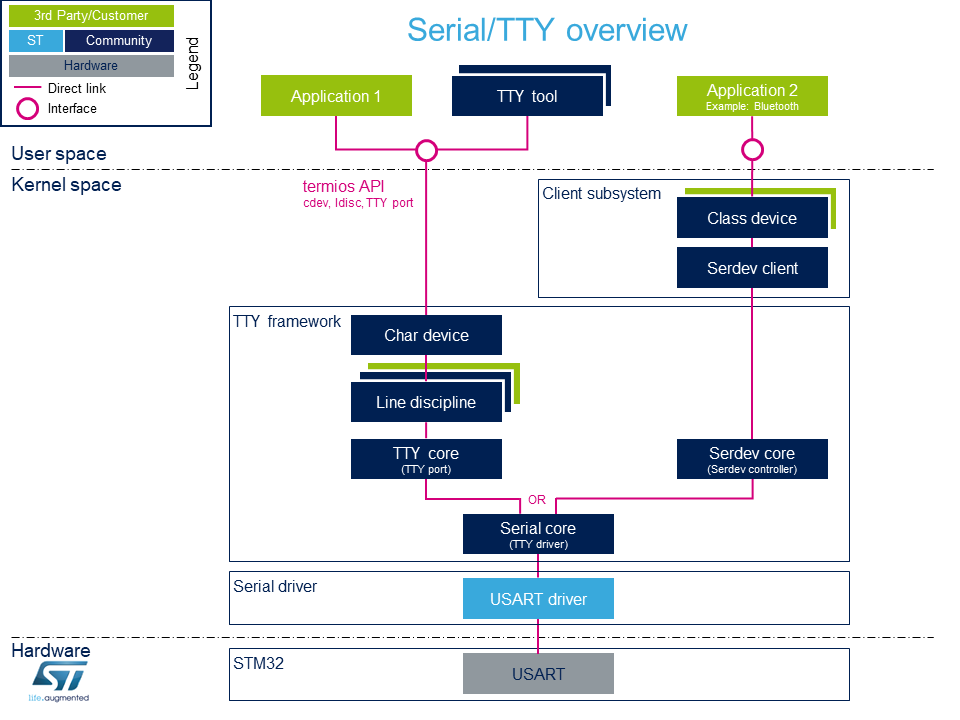
注意: 在引导过程中,当探测串行设备时,串行框架会将关联的tty终端实例化为虚拟设备。 然后,系统将该tty虚拟设备视为关联的串行设备的子级。
Components description
从客户端应用程序到硬件
- 应用程序:客户应用程序,用于从串行端口上连接的外围设备读取/写入数据。
- TTY tools: Linux社区提供的工具,例如stty,ldattach,inputattach,tty, ttys, agety, mingetty,kermit和 minicom。
- Termios: API,提供使用串行驱动程序开发应用程序的接口。
- 客户端子系统:serdev内核的内核子系统客户端(示例:蓝牙概述).
- TTY框架:高层TTY结构管理,包括drivers/tty/tty_io.c | |}} tty character device driver , drivers/tty | |}} TTY core functions , line discipline and drivers/tty/serdev | |}} Serdev core functions management.
- 串行框架:低级串行驱动程序管理,包括drivers/tty/serial/serial_core.c | |}} serial core functions 低级串行驱动程序,用于所有STM32系列设备。
- USART驱动程序:drivers/tty/serial/stm32-usart.c | |}} stm32-usart low-level serial driver 适用于所有STM32系列设备。
- STM32 USART: STM32前端IP通过串行端口连接到外部设备。
APIs description
TTY仅向用户空间提供字符设备接口(命名为/ dev / ttyX)。
用户空间TTY客户端应用程序的主要API由便携式POSIX终端接口termios提供,该终端依赖于/ dev / ttyX接口进行TTY链接配置。
[1] 是一个用户区域API,它的功能描述了用于控制异步通信端口的通用终端接口。
POSIX termios API抽象化了硬件的低级细节,并提供了一个简单而完整的编程接口,可用于高级项目。 它是character device API[2] ioctl操作。
注意:
如果在内核级别需要串行接口(例如,通过内核驱动程序通过U(S)ART控制外部设备),则客户可以使用 line discipline 或“ Serdev”客户端。
-
学科将负责:
- 创建这个新的内核API
- 在串行内核和新内核API之间路由数据流
-
Serdev提供了内核驱动程序的接口。
- 此界面类似于线路规则操作:打开和关闭,终端设置,写入,调制解调器控制,读取(回调)和写入唤醒(回调)
Configuration
本节介绍如何在串行端口上配置设备。
Kernel Configuration
默认情况下,ST交付中会激活串行驱动程序,串行框架和TTY框架。 但是,如果需要特定的配置,则本节说明如何在内核中激活/停用IIO。
使用Linux Menuconfig 工具。
对于TTY,选择:
Device Drivers --->
Character devices --->
[*] Enable TTY
允许删除可节省空间的TTY支持,并阻止需要TTY的功能包含在内核中。
任何文本终端或串行端口通信都需要TTY。 大多数用户应启用此功能。
对于STM32串行驱动程序,选择:
Device Drivers --->
Character devices --->
Serial drivers --->
<*> STMicroelectronics STM32 serial port support
[*] Support for console on STM32
该驱动程序用于STMicroelectronics STM32 MCU上的片上串行控制器。
USART支持Rx和Tx功能。它支持所有行业标准的波特率。
Device tree configuration
专用文章Serial TTY device tree configuration中描述了由于设备树而导致的UART配置。
How to use TTY
本节基于以下两个用例,描述如何从用户区域(从终端或应用程序)以及内核空间使用TTY:
- 如何使用termios结构配置串行端口
- 如何发送/接收数据
termios结构允许使用许多设置来配置通信端口,例如:
- Baud rate
- Character size mask
- Parity bit enabling
- Parity and framing errors detection settings
- Start/stop input and output control
- RTS/CTS (hardware) flow control
- ...
由于USART internal peripheral 支持7、8和9个字长的数据,因此支持以下termios字符大小和奇偶校验位配置:
- CS6 with parity bit
- CS7 with or without parity bit
- CS8 with or without parity bit
使用TTY的提示:
- 如何从用户终端使用TTY:专用文章中介绍了用户终端的TTY使用情况, How to use TTY from a user terminal
- 如何在应用程序中使用TTY:专用文章如何从应用程序调用TTY中描述了应用程序的TTY使用情况
- TTY线路规程:TTY线路规程在专门的文章中描述,Serial TTY line discipline
How to trace and debug the framework
How to monitor
由于Debugfs不提供有关串行或TTY框架的任何信息,因此监视串行和TTY框架的方法是使用 Dmesg和Linux内核日志 文章中所述的linux内核日志方法(基于printk)。
How to trace
Kernel boot log
以下内核启动日志摘录显示了已正确探测的串行驱动程序:
[ 0.793340] STM32 USART driver initialized [ 0.798779] 4000f000.serial: ttySTM1 at MMIO 0x4000f000 (irq = 25, base_baud = 4000000) is a stm32-usart [ 0.808875] stm32-usart 4000f000.serial: interrupt mode used for rx (no dma) [ 0.816106] stm32-usart 4000f000.serial: interrupt mode used for tx (no dma) [ 0.824253] 40010000.serial: ttySTM0 at MMIO 0x40010000 (irq = 27, base_baud = 4000000) is a stm32-usart [ 0.833796] console [ttySTM0] enabled [ 0.833796] console [ttySTM0] enabled [ 0.840862] bootconsole [earlycon0] disabled [ 0.840862] bootconsole [earlycon0] disabled [ 0.850132] stm32-usart 40010000.serial: interrupt mode used for rx (no dma) [ 0.855755] stm32-usart 40010000.serial: interrupt mode used for tx (no dma)
dmesg output information
系统日志显示在探测期间注册的UART设备和相关的TTY端子。
Board $> dmesg | grep ttySTM* [ 0.000000] Kernel command line: root=/dev/mmcblk0p5 rootwait rw earlyprintk console=ttySTM1,115200 # ttySTM1 terminal is associated with usart3 (4000f000.serial) # [ 0.798779] 4000f000.serial: ttySTM1 at MMIO 0x4000f000 (irq = 25, base_baud = 4000000) is a stm32-usart # ttySTM0 terminal is associated with uart4 (40010000.serial) for console# [ 0.824253] 40010000.serial: ttySTM0 at MMIO 0x40010000 (irq = 27, base_baud = 4000000) is a stm32-usart # ttySTM0 terminal is activated by default for console # [ 0.833796] console [ttySTM0] enabled
Dynamic trace
详细的动态跟踪可在How to use the kernel dynamic debug中找到。
Board $> echo "file drivers/tty/* +p" > /sys/kernel/debug/dynamic_debug/control
此命令在运行时启用与TTY内核和驱动程序相关的所有跟踪。
通过仅选择要跟踪的文件,可以进行更好的选择。
| 提醒:需要通过控制台使用引导参数或“ dmesg -n 8”命令将“ loglevel”增加到8 |
How to debug
在实例化TTY串行端口时,TTY内核通过devfs,sysfs和procfs导出不同的文件。
devfs
- 存储库/ dev包含所有探查的TTY串行设备。
Board $> ls /dev/ttySTM* # ttySTM1 and ttySTM0 terminals are probed # /dev/ttySTM1 /dev/ttySTM0
sysfs
- / sys / class / tty /列出了ttySx对应于串行端口设备的所有TTY设备。
Board $> ls /sys/class/tty/*/device/driver /sys/class/tty/ttySTM1/device/driver -> ../../../../bus/platform/drivers/stm32-usart /sys/class/tty/ttySTM0/device/driver -> ../../../../bus/platform/drivers/stm32-usart
- / sys / devices / platform / soc /列出所有探测到的usart设备
Board $> ls -d /sys/devices/platform/soc/*.serial # Serial devices 4000f000.serial (usart3) and 40010000.serial (uart4) are probed # /sys/devices/platform/soc/4000f000.serial /sys/devices/platform/soc/40010000.serial
- /sys/devices/platform/soc/device.serial/tty列出与串行设备关联的TTY终端
Board $> ls /sys/devices/platform/soc/4000f000.serial/tty/ # ttySTM1 is associated to serial device 4000f000.serial (usart3) # ttySTM1
procfs
- 仓库/ proc / device-tree列出了在设备树中声明的所有usart设备,包括禁用的设备。
Board $> ls -d /proc/device-tree/soc/serial@* /proc/device-tree/soc/serial@4000e000 /proc/device-tree/soc/serial@40010000 /proc/device- tree/soc/serial@40018000 /proc/device-tree/soc/serial@44003000 /proc/device-tree/soc/serial@4000f000 /proc/device-tree/soc/serial@40011000 /proc/device- tree/soc/serial@40019000 /proc/device-tree/soc/serial@5c000000
然后,对于列出的每个设备,设备树属性均可用。
Board $> ls /proc/device-tree/soc/serial@40010000/ clock-names compatible interrupts-extended name pinctrl-0 pinctrl-names reg wakeup-source clocks interrupt-names linux,phandle phandle pinctrl-1 power-domains status
- 例如,状态条目提供设备树节点中设备的状态。
Board $> cat /proc/device-tree/soc/serial@40010000/status # status of device serial@40010000 (uart4) is set to "okay" in the device tree # okay
- 文件/ proc / interrupts列出了活动串行端口的中断。
Board $> cat /proc/interrupts | grep serial 26: 0 0 GIC-0 71 Level 4000f000.serial 27: 0 0 stm32-exti-h 28 Edge 4000f000.serial 28: 13509 0 GIC-0 84 Level 40010000.serial 29: 0 0 stm32-exti-h 30 Edge 40010000.serial
- 文件/ proc / tty / driver / stm32-usart列出了每个串行实例的串行核心计数器和调制解调器信息。
- 驱动程序信息:
- serial driver name
- serial device start address
- irq number
- 计数器:
- tx: Number of bytes sent
- rx: Number of bytes received
- fe: Number of framing errors received
- pe: Number of parity errors received
- brk: Number of break signals received
- oe: Number of overrun errors received
- bo: Number of framework buffer overrun errors received
- 调制解调器信息:
- RTS: Request To Send
- CTS: Clear To Send
- DTR: Data Terminal Ready
- DSR: Data Set Ready
- CD: Carrier Detect
- RI: Ring Indicator
Board $> cat /proc/tty/driver/stm32-usart serinfo:1.0 driver revision: 0: uart:stm32-usart mmio:0x40010000 irq:29 tx:22722 rx:2276 RTS|CTS|DTR|DSR|CD 1: uart:stm32-usart mmio:0x4000F000 irq:27 tx:0 rx:1149 fe:121 oe:2 pe:296 brk:3 RTS|CTS|DTR|DSR|CD 3: uart:stm32-usart mmio:0x4000E000 irq:25 tx:0 rx:0 CTS|DSR|CD
How to go further
Linux社区提供了许多有关Linux串行/ TTY的详细文档。 请在下面找到最相关的选项:
- Linux Serial-HOWTO [3] 从硬件和软件角度描述了如何设置串行端口。
- POSIX兼容操作系统的串行编程指南[4] , 作者:Michael Sweet。
可以在以下Web文章中找到更多信息,以更好地了解Linux TTY框架:
References
- ↑ termios API, Linux Programmer's Manual termios API Documentation (user land API with serial devices)
- ↑ Character device API overview, Accessing hardware from userspace training, Bootlin documentation
- ↑ Linux Serial-HOWTO, tdlp.org training document, describes how to set up serial ports from both hardware and software perspectives
- ↑ Serial Programming Guide for POSIX Compliant Operating Systems, by Michael Sweet, training document
- ↑ TTY Subsystem, by IBM
- ↑ The TTY demystified TTY subsystem presentation article, by Linus Akesson
- ↑ Linux serial drivers training Linux Serial Drivers training, by Bootlin
- ↑ Linux Serial Drivers Serial drivers article describing data flows, by Alessandro Rubini
- ↑ The Serial Device Bus Serdev framework presentation, by Johan Hovold