“第022课 传感器”的版本间的差异
| 第525行: | 第525行: | ||
EEPROM使用 | EEPROM使用 | ||
| − | |||
| − | |||
*1 上电 | *1 上电 | ||
EEPROM自动放入RAM用于控制精度这些 | EEPROM自动放入RAM用于控制精度这些 | ||
*2 写EEPROM | *2 写EEPROM | ||
| − | + | **a 发出命令先写RAM | |
| − | + | **b从RAM传到EEPROM | |
*3 读出EEPROM的值 | *3 读出EEPROM的值 | ||
| − | + | **a EEPROM值保存到RAM | |
| − | + | **b 发出命令读RAM | |
关于ROM命令和功能命令整理成一个表格 | 关于ROM命令和功能命令整理成一个表格 | ||
2018年3月27日 (二) 20:44的版本
目录
第001节_光敏电阻的使用
这节课我们开始讲的传感器,有光敏电阻、DH11温湿度传感器、DS18B20温度传感器、HS0038红外接收器。
首先介绍光敏电阻传感器。
光敏电阻有一个特点,就是它的阻值随光照强度变化而变化,
看一下它的原理图,R5是一个普通电阻,LAS1是光敏电阻,它们串联组成一个分压电路,
LAS1阻值变化,将会导致中间RES_AO测得的电压发生变化。

这个电路图有点绕,画一个示意图如下:

使用ADC测量A点的电压,可以得知LAS1的变化情况,这里的测量是一个模拟信号。
现在假如需要这个光敏系统在光照大于/小于某个值时,发出中断,怎么办呢?
这里就需要再加一个比较的电路,B处的电压是可调电阻得到的电压,可以通过调节电阻进行变化。A、B两个电压最后接在一个比较器的“正负端”,当A>B时,输出1,反之输出0。
通过调节可调电阻,可以实现对比较阈值的控制。
现在这个电路就即可得到模拟信号和数字信号。
现在就可以开始写程序了,复制前面024的代码为025_sensors,这是这一章的第一个项目,再创建个001_photoresistor文件夹,将代码都放进去。
再创建一个sensors文件夹用来放本课的所有传感器代码,然后再创建photoresistor文件夹放本节课代码,再在里面创建photoresistor.c。
在代码里面,我们要做两件事:
- 1.启动ADC,读出AIN1电压值;
- 2.注册中断,当光线强度超过或小于某个阈值时,产生中断;
打开工程里的adc代码,原来的adc_init,只初始化了adc0,现在我们要用AIN1,修改下代码,传入个参数就能初始化对应的AIN:
void adc_init(int channel)
{
/* [15] : ECFLG, 1 = End of A/D conversion
* [14] : PRSCEN, 1 = A/D converter prescaler enable
* [13:6]: PRSCVL, adc clk = PCLK / (PRSCVL + 1)
* [5:3] : SEL_MUX, 000 = AIN 0
* [2] : STDBM
* [0] : 1 = A/D conversion starts and this bit is cleared after the startup.
*/
ADCCON = (1<<14) | (49<<6) | (channel<<3);
ADCDLY = 0xff;
}
后面的adc_read_ain0只能读取AIN0的数据,现在修改一下,传入个通道参数,就能读取对应通道的ADC值:
int adc_read(int channel)
{
adc_init(channel);
/* 启动ADC */
ADCCON |= (1<<0);
while (!(ADCCON & (1<<15))); /* 等待ADC结束 */
return ADCDAT0 & 0x3ff;
}
修改了这两个函数,原来的adc_test函数里调用的adc读取函数也要对应进行修改。
参考这个adc_test,编写photoresistor_test函数。
需要修改的内容并不多,首先是修改adc_read参数,将通道0改为通道1。
然后我们想同时再把AIN0上的滑动电阻对应的电压也读出来,因此再做一次ADC0读取的操作。
void photoresistor_test(void)
{
int val, val0;
double vol, vol0;
int m, m0; /* 整数部分 */
int n, n0; /* 小数部分 */
//adc_init();
while (1)
{
val = adc_read(1);
vol = (double)val/1023*3.3; /* 1023----3.3v */
m = (int)vol; /* 3.01, m = 3 */
vol = vol - m; /* 小数部分: 0.01 */
n = vol * 1000; /* 10 */
val0 = adc_read(0);
vol0 = (double)val0/1023*3.3; /* 1023----3.3v */
m0 = (int)vol0; /* 3.01, m = 3 */
vol0 = vol0 - m0; /* 小数部分: 0.01 */
n0 = vol0 * 1000; /* 10 */
/* 在串口上打印 */
printf("photoresistor vol: %d.%03dv, compare to threshold %d.%03dv\r", m, n, m0, n0); /* 3.010v */
/* 在LCD上打印 */
//fb_print_string();
}
以上就完成了我们的第一个目标。
现在开始做第二个目标,注册中断放在interrupt.c里实现。
硬件上RES_DO是EINT15。我们可以仿照之前的按键中断来编写本次的中断。
先分析一下中断,如图:

GPG7作为中断引脚,它会先经过外部中断EINTMASK寄存器,才能进入到中断控制器。
所以,需要做以下操作:
- ①首先初始化:
- a.GPG7配置为中断引脚;
- b.设置中端触发方式:双边沿触发;
- c.设置EINTMASK使能中断;
- ②中断处理:
- a.分辨:读EINTPEND;
- b.读GPG7;
在原来的key_eint_init函数里配置GPG7为中断引脚:
/* 配置GPG7为中断引脚, 用于光敏电阻 */
GPGCON &= ~((3<<14));
GPGCON |= ((2<<14));
然后设置中端触发方式:双边沿触发
/* 设置中断触发方式: 双边沿触发 */
EXTINT0 |= (7<<0) | (7<<8); /* S2,S3 */
EXTINT1 |= (7<<12); /* S4 */
EXTINT2 |= (7<<12); /* S5 */
最后再使能中断:
/* 使能中断GPG7/EINT15, 用于光敏电阻 */
EINTMASK &= ~((1<<15));
修改key_eint_irq中断处理函数,先判断是哪个中断产生,再读取电平,打印。
else if (val & (1<<15)) /* eint15, 用于光敏电阻 */
{
if (val2 & (1<<7))
{
printf("\n\rphotoresistor dark!\n\r");
}
else
{
printf("\n\rphotoresistor light!\n\r");
}
}
至此,代码就写完了,最后还要修改对应的Makefile和主函数。
第002节_高精度延时函数
在后续我们对讲解多个传感器,这几个传感器对时序的要求都比较高,比如温湿度传感器DH11,查看芯片手册时序,至少就需要微秒级的延时函数。
延时函数的方式一般有两种:
- ①:使用for循环,利用示波器等工具测得精确值;
- ②:使用定时器,通过不断检测定时器的计数值获得精确时间;
使用for循环的方式,可能会因为硬件的差异,导致延时函数不准,因此这里我们使用定时器的方式。
打开之前的timers.c文件,修改timer_init函数的配置。
PCLK仍然等于50000000,将prescaler value改为4,divider value设置为2,
这样,每减1, 对应0.2us;每减5, 对应1us;从50000减到0,对应10ms。
修改对应的寄存器:
TCFG0 = 4; /* Prescaler 0 = 4, 用于timer0,1 */
TCFG1 &= ~0xf; /* MUX0 : 1/2 */
/* 设置TIMER0的初值 */
TCNTB0 = 50000; /* 10Ms中断一次 */
我们先写一个us延时的函数,然后ms延时就调用us即可。
因此,us延时函数里,尽量少调用函数。
假如现在要延时nus,我们先将n*5,得到nus对应的“计数时钟数”。
然后如果传入“计数时钟周期”如果大于0,则一直计算过去了多少个“计数时钟数”,与传入的“计数时钟数”相减,直到为零,退出循环,也就实现了延时nus。
怎样计算过去了多少个“计算周期”呢?
自然是当前的值,减去一开始进入函数的值。
但还有一种情况是定时器里的计数记到0时,会自动变成5000,计数计数,这时候,计算方式就变成了pre+(5000-cur):

/* 尽量少调用函数 */
void udelay(int n)
{
int cnt = n * 5; /* u us 对应n*5个计数值 */
int pre = TCNTO0;
int cur;
int delta;
while (cnt > 0)
{
cur = TCNTO0;
if (cur <= pre)
delta = pre - cur;
else
delta = pre + (50000 - cur);
cnt = cnt - delta;
pre = cur;
}
}
然后时ms延时函数:
void mdelay(int m)
{
udelay(m*1000);
}
我们可以写一个测试函数,简单的测试下是否可用,测试函数隔1分钟进行打印一下。
如果us不准的话,放大至s,会有比较大的偏差,这样可以进行粗略的检测,精确检测可以使用示波器等工具。
void hrtimer_test(void)
{
int cnt = 0;
while (1)
{
printf("delay one min: ");
mdelay(60000); /* 延时1分钟 */
printf("%d\n\r", ++cnt);
}
}
前面延时里的计算还是比较耗费时间的,因此,我们尽量提高CPU的运行时钟,并且 将尽可能的启动icache、dcache和mmu。
此外,如果延时过程中,发生了中断,如果中断比较耗时的话,就会导致延时可能出现不准确,所以,我们可以延时之前关中断, 延时之后开中断;
课后作业:
- a. 禁止icache, 禁止mmu, 修改lds, 测试延时函数是否还准确;
- b. 测试延时之前关中断, 延时之后开中断;
第003节_DHT11温湿度传感器的使用
这节课开始讲解DH11温湿度传感器的使用,首先查看芯片手册,里面的典型应用电路如下:

MCU通过一条数据线与DH11连接,MCU通过这条线发命令给DH11,DH11再通过这条线把数据发送给MCU。
因此,温湿度模块的核心就是 MCU发给DH11的命令格式和DH11返回的数据格式。
再来先简单看一下通讯的时序:

灰色这条线是由MCU驱动控制的,浅色的部分是由DH11驱动控制的。
首先MCU发送一个开始信号,这个开始信号是一个低脉冲,然后再拉高。
然后,DH11拉低,做出一个响应信号,再拉高。
接着就是DH11返回的数据。
这些数据一共有40bit,高位先出。
数据格式:8bit湿度整数数据+8bit湿度小数数据+8bi温度整数数据+8bit温度小数数据+8bit校验和
且当前小数部分用于以后扩展,现读出为零.
数据传送正确时校验和数据等于“8bit湿度整数数据+8bit湿度小数数据+8bi温度整数数据+8bit温度小数数据”所得结果的末8位。
DH11的难点是前面所说的时序脉冲,需要满足一定的时长.比如开始信号:

MCU必须先拉低至少18ms,然后再拉高20-40us,DH11再拉低80us以响应,最后再拉高80us.
接下来就是传输数据,我们的目的就是读到温湿度的数据,这些数据由DH11提供,那它怎么传回这些数据,怎么表示0和1呢?


可以看到,不管是0还是1,都开始是50us的低电平,
对于0数据,之后是26~28us的高电平;
对于1数据,之后是70us的高电平;
有了上面的知识,加上之前的高精度延时,现在就可以开始写程序了。
复制前面的第二个程序,文件名改为003_dht11_022_003,然后在sensors目录里新建dht11目录,再创建一个dht11.c文件。
我们的目的是,控制GPIO读取DHT11的数据,流程如下:
- 1. 主机发出至少18MS的低脉冲: start信号
- 2. start信号变为高, 20-40us之后, dht11会拉低总线维持80us,然后拉高80us: 回应信号
- 3. 之后就是数据, 逐位发送
- bit0 : 50us低脉冲, 26-28us高脉冲
- bit1 : 50us低脉冲, 70us高脉冲
- 4. 数据有40bit: 8bit湿度整数数据+8bit湿度小数数据+8bit温度整数数据+8bit温度小数数据+8bit校验和
DH11的DATA引脚连接到了GPG5。
先实现GPIO的基本操作,配置GPIO模式,实现输出、输入引脚的功能:
static void dht11_data_cfg_as_output(void)
{
GPGCON &= ~(3<<10);
GPGCON |= (1<<10);
}
static void dht11_data_cfg_as_input(void)
{
GPGCON &= ~(3<<10);
}
再设置输出电平或读取引脚数据:
static void dht11_data_set(int val)
{
if (val)
GPGDAT |= (1<<5);
else
GPGDAT &= ~(1<<5);
}
static int dht11_data_get(void)
{
if (GPGDAT & (1<<5))
return 1;
else
return 0;
}
再来实现DHT11的读操作。
在芯片手册里介绍说,DH11传感器上电后,要等待1s,以越过不稳定状态,在此期间无需发送任何指令。
因此首先写一个初始化函数,跳过这个不稳定状态:
void dht11_init(void)
{
dht11_data_cfg_as_output();
dht11_data_set(1);
mdelay(2000);
}
根据start时序要求,编写程序,维持一个大于18ms的低电平,然后释放引脚,及设置为输入引脚即可。
因为该引脚接有上拉电阻,一旦MCU设置为输入,引脚电平将有上拉电阻决定。
static void dht11_start(void)
{
dht11_data_set(0);
mdelay(20);
dht11_data_cfg_as_input();
}
然后等待40us以上,再去读取引脚电平,判断是否被拉低,以确定DH11给了响应。
static int dht11_wait_ack(void)
{
udelay(60);
return dht11_data_get();
}
再写个延时函数,用于时序中的,等待响应信号结束:
static int dht11_wait_for_val(int val, int timeout_us)
{
while (timeout_us--)
{
if (dht11_data_get() == val)
return 0; /* ok */
udelay(1);
}
return -1; /* err */
}
后面的数据会有五个字节组成,这里先写出读取一个字节,每个字节要读取8位。
先等待直到高电平,过滤到共同的50us延时,然后延时28us以上,再读取引脚电平,
如果引脚电平是1,则数据是1,反之是0。
然后再直到低电平的到来,循环8次,完成一个字节数据的读取。
static int dht11_recv_byte(void)
{
int i;
int data = 0;
for (i = 0; i < 8; i++)
{
if (dht11_wait_for_val(1, 1000))
{
printf("dht11 wait for high data err!\n\r");
return -1;
}
udelay(40);
data <<= 1;
if (dht11_data_get() == 1)
data |= 1;
if (dht11_wait_for_val(0, 1000))
{
printf("dht11 wait for low data err!\n\r");
return -1;
}
}
return data;
}
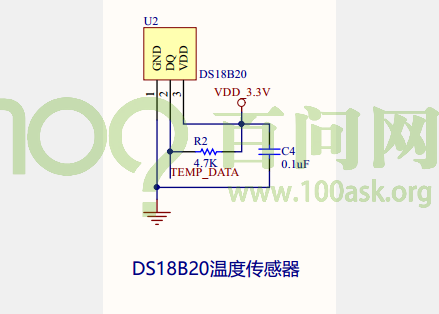
第004节_DS18B20温度传感器介绍
比DHT11温湿度传感器精度高很多

DS18B20只通过一条数据线传输数据,既要控制器发送数据给芯片,又要通过芯片发送数据给控制器,所以这个是双向传输数据的
怎么在一个引脚上实现数据的双向传输 : 参考这视频的第19分钟之后的内容: 第19课_第001节_I2C协议与EEPROM
检测温度,我们需要一个主控芯片
如果有多个温度传感器,则需要一个主控制器去管理它们,通过发送命令传输数据,每个设备都会有固化在芯片内部的64bit ID的ROM来用于区分不同的设备
如果主控制器想访问设备,必须发送命令,这个命令中带有ID返回值
怎么访问指定的DS18B20
- 0 发出低脉冲,提醒准备工作: initialization
- 1 发出ID命令:ROM Command
- 2 发出功能命令: Function Command
a转换温度 b读温度,读数据
每次操作,都要重重上述过程
内部框图

TEMPERATURE SENSOR温度ADC
SCRATCHPAD实际上是一个9 byte的内存 9byte的说明如下图所示

温度值会保存在9byte内存中的 BYTE0 和 BYTE1 也就是当我们发出一个温度值的命令之后,还需要发送一个读内存的命令才能把温度值读取出来
最后一位是CRC校验码,通过前8位的数据和最后一位的校验码比较 64位数据中有8位是校验码,
怎么采样温度?
- 1 初始化
- 2 ROM命令
- 3 FunctionCommand 设置某些值,比如转换温度
- 4等待完成
- 5 init
- 6 R om cmd
- 7 Function Command 读RAM中的值

关于EEPROM寄存器 前面两个字节可以用来设置用户自己的目的,也可以用来设置Th Tl 寄存器 Th Tl 寄存器就是用来设置警报,温度的上限或者下限,当温度超过某个值时它会发出警报 所谓警报只不过是在DS18B20中设置状态而已,并不能主动通知主芯片 主芯片可以发出某些命令来确定那些芯片发出了警报 配置寄存器,用于设置精度,精度越高转换时间越长
EEPROM使用
- 1 上电
EEPROM自动放入RAM用于控制精度这些
- 2 写EEPROM
- a 发出命令先写RAM
- b从RAM传到EEPROM
- 3 读出EEPROM的值
- a EEPROM值保存到RAM
- b 发出命令读RAM
关于ROM命令和功能命令整理成一个表格
| ROM Commands | 命令名称 | 描述 |
|---|---|---|
| F0H | Search ROM | 搜索ROM 用于确定挂接在同一总线上DS18B20的个数,识别64位ROM地址 |
| 33H | Read ROM | 读ROM 读DS18B20芯片中的编码值,即64位ROM值 |
| 55H | Match ROM | 匹配ROM 发出此命令后,接着发出64位ROM编码,用于选中某个设备 |
| CCH | Skip ROM | 忽略ROM 表示后续发出的命令将会发给所有设备 如果总线上只有一个DS18B20,则特别适用此命令 |
| ECH | Alarm ROM | 警报搜索 执行此命令后,只有温度超过设定值上限或下限的芯片才会做出响应 |
| Function Commands | 命令名称 | 描述 |
|---|---|---|
| 44H | Convert Teamperature | 启动温度转换,注意不同精度需要不同转换时间,
结果存入内部RAM |
| 4EH | Write Scratchpad | 写内部RAM,可以写入3字节:TH,TL,配置值(用于选择精度)TH,TL可用于设置报警上下限,或给用户自己使用 |
| BEH | Read Scratchpad | 读整个内部RAM,9字节 |
| 48H | Copy Scratchpad | 把内部RAM中的TH、TL、配置值,复制给EEPROM |
| B8H | Recall EEPROM | 从EEPROM中把TH、TL、配置值,读到内部RAM |
| B4H | Read Power Supply | 分辨DS18B20的供电方式:用电源引脚供电,或从数据线偷电 |
信号传输
1怎么initialization(初始化) 2 怎么发数据,怎么发出1bit 怎么发出bit0 怎么发出bit1 3怎么读数据==>怎么读1bit
怎么判读读到0 怎么判断读到1
初始化时序

一开始是高电平,想要开始传输信号,必须要拉低至少480us释放总线 经过15~60us之后 DS18B20会把这条线拉低60~240us
2 怎么发数据,怎么发出1bit 怎么发出bit0 怎么发出bit1
写数据时序

不论是写0还是写1时序都是大于60us 写0拉低总线维持60us以上 写1时,信号线拉低1us时间,提醒要写数据了,让后回高,写1位之间的时间间隔1us

读数据时序 也是由主机发起 提醒脉冲大于1us,主机马上释放总线 在15us之内读信号,一个读周期至少是60us,每位的间隔也是1us
DS18B20提供了编程图

供电方式

参考资料: DS18B20 驱动编写 http://blog.csdn.net/zqixiao_09/article/details/50973969
CRC8校验分析和DS18B20的CRC8编程实现方法 http://www.360doc.com/content/15/1230/17/27708084_524223594.shtml
第005节_DS18B20温度传感器编程
设置精度相关的位

创建ds18b20目录 查看使用那个引脚

使用GPG6引脚
#include "../../s3c2440_soc.h"
/* 使用GPG6作用ds18b20的DATA引脚 */
/*定义命令和函数的宏*/
/* rom commands */
#define SEARCH_ROM 0xF0
#define READ_ROM 0x33
#define MATCH_ROM 0x55
#define SKIP_ROM 0xCC
#define ALARM_ROM 0xEC
/* functions commands */
#define CONVERT_TEAMPERATURE 0x44
#define WRITE_SCRATCHPAD 0x4E
#define READ_SCRATCHPAD 0xBE
#define COPY_SCRATCHPAD 0x48
#define RECALL_EEPROM 0xB8
#define READ_POWER_SUPPLY 0xB4
/* 先实现GPIO的基本操作 */
static void ds18b20_data_cfg_as_output(void)
{
GPGCON &= ~(3<<12);
GPGCON |= (1<<12);
}
static void ds18b20_data_cfg_as_input(void)
{
GPGCON &= ~(3<<12);
}
static void ds18b20_data_set(int val)
{
if (val)
GPGDAT |= (1<<6);
else
GPGDAT &= ~(1<<6);
}
static int ds18b20_data_get(void)
{
if (GPGDAT & (1<<6))
return 1;
else
return 0;
}
/*通过函数设置时间
*/
static void ds18b20_data_set_val_for_time(int val, int us)
{
ds18b20_data_cfg_as_output();
ds18b20_data_set(val);
udelay(us);
}
/*
ds18b20释放总线
*/
static void ds18b20_data_release(void)
{
ds18b20_data_cfg_as_input();
}
/* ds18b20的代码
*先实现ds18b20初始化操作
*/
static int ds18b20_initialization(void)
{
int val;
ds18b20_data_set_val_for_time(0, 500);
ds18b20_data_release();
udelay(80);
val = ds18b20_data_get();
udelay(250);
return val;
}
/*
实现写入一位数据
*/
static void ds18b20_write_bit(int val)
{
if (0 == val)
{
ds18b20_data_set_val_for_time(0, 60);
ds18b20_data_release();
udelay(2);
}
else
{
ds18b20_data_set_val_for_time(0, 2);
ds18b20_data_release();
udelay(60);
}
}
/*
实现一位数据的读操作
*/
static int ds18b20_read_bit(void)
{
int val;
ds18b20_data_set_val_for_time(0, 2);
ds18b20_data_release();
udelay(10);
val = ds18b20_data_get();
udelay(50);
return val;
}
/*
实现写一字节数据函数
*/
static void ds18b20_write_byte(unsigned char data)
{
/*
优先传输最低位
*/
int i;
for (i = 0; i < 8; i++)
{
ds18b20_write_bit(data & (1<<i));
}
}
/*
实现读一字节数据函数
*/
static unsigned char ds18b20_read_byte(void)
{
int i;
unsigned char data = 0;
for (i = 0; i < 8; i++)
{
if (ds18b20_read_bit() == 1)
data |= (1<<i);
}
return data;
}
/*
写入一字节的命令数据
*/
static void ds18b20_write_rom_cmd(unsigned char cmd)
{
ds18b20_write_byte(cmd);
}
/*
写入一字节的功能命令数据
*/
static void ds18b20_write_function_cmd(unsigned char cmd)
{
ds18b20_write_byte(cmd);
}
/*
实际操作函数
读rom
*/
int ds18b20_read_rom(unsigned char rom[])
{
int i;
if (ds18b20_initialization() != 0)
{
printf("ds18b20_initialization err!\n\r");
return -1;
}
ds18b20_write_rom_cmd(READ_ROM);
for (i = 0; i < 8; i++)
{
rom[i] = ds18b20_read_byte();
}
return 0;
}
int ds18b20_wait_when_processing(int timeout_us)
{
while (timeout_us--)
{
if (ds18b20_read_bit() == 1)
return 0; /* ok */
udelay(1);
}
return -1;
}
/*
启动温度传输
*/
int ds18b20_start_convert(void)
{ /*
所有操作到要先发出初始化操作,再发出rom命令
*/
if (ds18b20_initialization() != 0)
{
printf("ds18b20_initialization err!\n\r");
return -1;
}
ds18b20_write_rom_cmd(SKIP_ROM);
ds18b20_write_function_cmd(CONVERT_TEAMPERATURE);
/* 等待/判断转换成功 */
if (0 != ds18b20_wait_when_processing(1000000))
{
printf("ds18b20_wait_when_processing err!\n\r");
return -1;
}
return 0;
}
/*
读ram中的数据
*/
int ds18b20_read_ram(unsigned char ram[])
{
int i;
if (ds18b20_initialization() != 0)
{
printf("ds18b20_initialization err!\n\r");
return -1;
}
ds18b20_write_rom_cmd(SKIP_ROM);
ds18b20_write_function_cmd(READ_SCRATCHPAD);
for (i = 0; i < 9; i++)
{
ram[i] = ds18b20_read_byte();
}
return 0;
}
/*
读温度
*/
int ds18b20_read_temperature(double *temp)
{
int err;
unsigned char ram[9];
/*每一位都是前面一位的两倍*/
double val[] = {0.0625, 0.125, 0.25, 0.5, 1, 2, 4, 8, 16, 32, 64};
double sum = 0;
int i;
err = ds18b20_start_convert();
if (err)
return err;
err = ds18b20_read_ram(ram);
if (err)
return err;
/* 计算温度 */
/* 先判断精度 byte4 的4位和6位*/
if (ram[4] & (3<<5) == 0) /* 精度: 9bit */
i = 3;
else if (ram[4] & (3<<5) == (1<<5)) /* 精度: 10bit */
i = 2;
else if (ram[4] & (3<<5) == (2<<5)) /* 精度: 11bit */
i = 1;
else
/* 精度是 12 bit */
i = 0;
for (; i < 8; i++)
{
if (ram[0] & (1<<i))
sum += val[i];
}
for (i = 0; i < 3; i++)
{
if (ram[1] & (1<<i))
sum += val[8+i];
}
if (ram[1] & (1<<3))
sum = 0 - sum;
*temp = sum;
return 0;
}
void ds18b20_init_state(void)
{
ds18b20_data_release();
}
void ds18b20_test(void)
{
unsigned char rom[8];
int i;
double temp;
int m,n;
/*一开始我们应该保证为高电平*/
ds18b20_init_state();
//while (1)
{
if (ds18b20_read_rom(rom) == 0)
{
printf("ds18b20 rom: ");
for (i = 0; i < 8; i++)
{
printf("%02x ", rom[i]);
}
printf("\n\r");
}
}
while (1)
{
/*循环打印温度*/
if (0 == ds18b20_read_temperature(&temp))
{ /*实现浮点数的打印*/
m = (int)temp; /* 3.01, m = 3 */
temp = temp - m; /* 小数部分: 0.01 */
n = temp * 10000; /* 10 */
/* 在串口上打印 */
printf("ds18b20 temperature: %d.%04d\n\r", m, n); /* 3.010v */
}
}
}
修改main.c 添加
ds18b20_test();
修改Makefile 添加
objs += sensors/ds18b20/ds18b20.o
由于使用数组涉及到了memcpy 所以编译出错,现在需要实现在string_utils.c实现memcpy函数
void *memcpy(void *dest, const void *src, int count)
{
char *tmp = dest;
const char *s = src;
while (count--)
*tmp++ = *s++;
return dest;
}
烧写
课后作业:
- a. 使用CRC较验 64bit rom数据
- b. 使用CRC较验 9byte的 ram数据
- c. 增加写ram, 写eeprom的功能, 设置转换精度
第006节_红外线遥控协议简介及编程思路
本节开始讲解红外遥控器信号的接收和解码,视频分为三部分,每一部分都专注做一件事情,让每节视频更短一点。
红外遥控器的操作比前面的温度、温湿度传感器都要简单。
首先看一下原理图上的红外遥控接收器:

我们用遥控器对它按动的时候,它就可以接收到红外信号,然后把红外信号转换成电平信号,通过IRD这根线,传给SOC。
整个传输,只涉及单向传输,由HS0038向主芯片传送。
因此,我们只需要编写程序,从IRD上获取数据即可,在这之前,我们需要先了解下数据是怎么表示的,也就是传输的红外数据的格式。
红外协议有:NEC、SONY、RC5、RC6等,常用的就是NEC格式,因此我们主要对NEC进行讲解。
可以参考这个文章,直观的了解下NEC格式波形的样子:
https://www.cnblogs.com/openusb/archive/2010/01/07/1641357.html
在分析文章中的波形之前,我们先想象一下怎么在一条数据线上传输信号。
开始传输数据之前,一般都会发出一个start起始信号,通知对方我开始传输数据了,后面就是每一位每一位的数据。
NEC协议的开始是一段引导码:

这个引导码由一个9ms的低脉冲加上一个4.5ms的高脉冲组成,它用来通知接收方我要开始传输数据了。

然后接着的是数据,数据由4字节组成:地址、地址(取反)、数据、数据(取反),这些取反是用来校验用的。
地址是指遥控器的ID,每一类遥控器的ID都不一样,数据就是遥控器上的不同按键。
从前面的图可以知道,NEC每次要发32位的数据,每一位用什么来表示0和1呢?

数据1和01,开始都是0.56ms的低脉冲,对于数据1,后面的高脉冲比较长,对于数据0,后面的高脉冲比较短。 可以看出,红外遥控器的数据表示方法是比较简单的。
我们长按一个按键,第一次按的时候,他会发出引导码,地址,地址取反,数据,数据取反。
接着由于长按,遥控器会发送一个不一样的引导码,这个引导码由9ms的低脉冲,2.25ms的高脉冲组成,表示现在按的还是上次一样的按键,然后再一直是引导码(重复),直到松开。

在后面的调试中,发现以上并不是NEC协议的全部,打开bing国际版搜索“ir nec protocal”,得到一篇官方文章:http://techdocs.altium.com/display/FPGA/NEC+Infrared+Transmission+Protocol
里面的内容和前面文章基本一致,但这个更详细,发现每次数据传输完还有一个0.5625ms的低脉冲表示数据传输结束。
对于引导码(重复)也一样,也有一个0.5625ms的低脉冲表示传输结束。
大部分文章都漏掉了结束的低脉冲。
NEC协议里有很多时间,这些时间有一个有趣的现象,把所有时间里面最小的0.53ms看作基本脉冲宽度,假设用t表示,那么其它所有时间都是t的倍数:

我们可以看到对于所有的时间,最小的单位都是0.56ms,这个时间对人来说是非常短的,但对嵌入式系统它是非常非常长的了,足够我们做很多事情了,那么我们可以使用中断来处理这些数据。
并且对于红外遥控器来说,我们根本不知道用户什么时候按下遥控器,使用轮询的方式特别耗资源,因此直接使用中断来处理。
使用官方文档的时序图:

图中的脉冲方向正好相反,绿色表示低脉冲,白色表示高脉冲。
涉及内容:
- ①中断引脚设置为双边缘触发,在每一个脉冲变化的地方都会产生中断;
- ②发生中断时,计算当前中断与上次中断之间的时间差,就得到脉冲宽度,放入buffer,同时还要记录引脚极性;
- ③主循环从buffer取出数据,并解析时序;
我们可以估算下,每按下一次遥控器,会产生多少中断,2+32*2+1=67次。
中断发生时,将数据放入buffer,主函数从buffer取出数据,用什么数据结构来实现数据的存取?
最好的方式就是环形缓冲区,所谓环形缓冲区就是一边存储数据一边读取数据,下节课再详细讲解。
编程要点:
- ①中断
- ②系统时间
- ③环形缓冲区
- ④NEC解析
第007节_前期编程_系统时间与环型缓冲区
这节课实现两个小功能:系统时间和环形缓冲区。
在上一课的基础上添加代码,打开timer.c,前面的设置的定时器,每10ms产生一次中断,这里定义一个全局变量,来记录产生次数,
static unsigned int g_system_time_10ms_cnt = 0;
这里的类型选择使用unsigned int类型,2^32*10/1000/3600/24=497天,也就是说如果运行497天后,计数溢出,将会导致一些问题。
改为unsigned long long类型的话,2^64*10/1000/3600/24/365=5849424173年,这个时间就不怕溢出了,因此这里计数变量的类型为unsigned long long:
static unsigned long long g_system_time_10ms_cnt = 0;
在定时器中断timer_irq()函数里面让这个计数值每次加1:
g_system_time_10ms_cnt++;
以后我们就可以读取这个计数值,知道系统时间。
现在开始编写获取系统时间的函数,精度要求是us级别的,读取TCNTO0的值,再加上g_system_time_10ms_cnt的计数:
unsigned long long get_system_time_us(void)
{
unsigned long long us = (50000 - TCNTO0)/5;
return g_system_time_10ms_cnt * 10 * 1000 + us;
}
通过这个函数就知道上电到之后任何一个时刻,过去了多久。
再写一个函数计算两段时间之间的差值:
unsigned int delta_time_us(unsigned long long pre, unsigned long long now)
{
return (now - pre);
}
到此,系统时间相关函数就完成了。
首先介绍一下环形缓冲区,假设有一个数组char Buf[6],它的结构如下:

定义一个读指针r=0,一个写指针w=0。
- 写数据:
buf[w] = val;
w = (w+1)%LEN = (w+1)%6;
- 读数据:
val = buf(r);
r = (r+1)%LEN;
如何判断buf是空:
r == w; //为空
如何判断buf是满:
(w+1)%LEN == r; //为满
读写指针,每到达最后面,就从0开始,就像一个圆环一样,因此得名环形缓冲区。
对于我们红外数据,保存的数据并不是char,而是一个结构体,里面含有脉冲宽度,引脚极性等。
在sensors文件下创建一个irda文件夹,里面创建irda_raw.h和circle_buffer.c,在irda_raw.h里定义一个数据结构体,包含极性和脉冲宽度:
#ifndef _IRDA_RAW_H
#define _IRDA_RAW_H
typedef struct irda_raw_event {
int pol; /* 极性 */
int duration; /* 脉冲宽度, us */
}irda_raw_event, *p_irda_raw_event;
#endif /* _IRDA_RAW_H */
然后在circle_buffer.c实现环形缓冲区。
先定义个irda_raw_event类型的g_events[]数组,这里大小设置为1024,
之前介绍过,每传一次irda,至少会传67次数据,因此这个buf要至少大于67行,再定义两个读写指针位置。
static irda_raw_event g_events[1024];
static int g_r = 0;
static int g_w = 0;
判断buf是否是空的函数:
static int is_ir_event_buf_empty(void)
{
return g_r = g_w;
}
判断buf是否是满的函数:
static int is_ir_event_buf_full(void)
{
return NEXT_PLACE(g_w) == g_r;
}
其中,(w+1)%LEN使用宏NEXT_PLACE(i)代替,宏的定义如下:
#define NEXT_PLACE(i) ((i+1)&0x3FF)
%的操作使用位&操作实现一样的效果。
然后是把数据放入缓冲区:
int ir_event_put(p_irda_raw_event pd)
{
if (is_ir_event_buf_full())
return -1;
g_events[g_w] = *pd;
g_w = NEXT_PLACE(g_w);
return 0;
}
先判断的缓冲区是否已满,没满的话就在写的位置放入数据,然后写位置再移动到下一个。
最后是读数据:
int ir_event_get(p_irda_raw_event pd)
{
if (is_ir_event_buf_empty())
return -1;
*pd = g_events[g_r];
g_r = NEXT_PLACE(g_r);
return 0;
}
先判断的缓冲区是否是空,没空的话就在读的位置读出数据,然后读位置移到到下一个。
修改Makefile,添加本次写的新文件。
第008节_HS0038红外线接收器的编程_打印原始脉冲
先打印出原始数据
irda_raw.c irda_raw.h
获取电平极性方式,当前引脚极性电平取反
#include "../../s3c2440_soc.h"
#include "irda_raw.h"
/* IRDA引脚 : EINT1/GPF1 */
static unsigned long long g_last_time = 0;
/*
* 配置GPIO, 注册中断
* 在中断处理函数里:
记录中断发生的时间,
跟上次中断的时间比较, 计算出脉冲宽度
读取引脚极性
把数据放入环型缓冲区
*/
/* 先实现GPIO的基本操作 */
static void irda_data_cfg_as_eint(void)
{
/* 配置为中断引脚 */
GPFCON &= ~(3<<2);
GPFCON |= (2<<2);
/* 设置中断触发方式: 双边沿触发 */
EXTINT0 |= (7<<4); /* eint1 */
}
static int irda_data_get(void)
{ /*如果bit1 等于1就表明高电平,返回1 */
if (GPFDAT & (1<<1))
return 1;
else
return 0;
}
/*irda中断处理函数*/
void irda_irq(int irq)
{
/* 在中断处理函数里:
记录中断发生的时间,
跟上次中断的时间比较, 计算出脉冲宽度
读取引脚极性
把数据放入环型缓冲区
*/
irda_raw_event event;
/*获得当前时间并赋值给cur*/
unsigned long long cur = get_system_time_us();
/*上次时间和这次时间的差值,也就是周期*/
event.duration = delta_time_us(g_last_time, cur);
/*获取引脚极性*/
event.pol = !irda_data_get();
/*我们需要环形缓冲区的函数放入环形缓冲区 */
ir_event_put(&event);
/*更新时间*/
g_last_time = cur;
}
/* 注册中断 仿照之前的按键中断程序 */
void irda_init(void)
{ /*1. 配置为中断引脚
* 2. 配置为双边沿触发
*/
irda_data_cfg_as_eint();
/*注册中断*/
register_irq(1, irda_irq);
}
/*测试原始数据*/
void irda_raw_test(void)
{
irda_raw_event event;
unsigned long long pre = 0, cur;
irda_init();
while (1)
{
/*如果从唤醒缓冲区读到数据,就把它打印出来*/
if (0 == ir_event_get(&event))
{
cur = get_system_time_us();
/*如果这次时间和上次时间相差远的话,就打印回车换行*/
if (delta_time_us(pre, cur) > 1000000)
printf("\n\r");
pre = cur;
/*使用三目运算符来判断pol是高电平还是低电平*/
printf("%s %d us | ", event.pol? "hight" : "low", event.duration);
}
}
}
irda_raw.h定义极性和脉冲宽度结构体
#ifndef _IRDA_RAW_H
#define _IRDA_RAW_H
typedef struct irda_raw_event {
int pol; /* 极性 */
int duration; /* 脉冲宽度, us */
}irda_raw_event, *p_irda_raw_event;
#endif /* _IRDA_RAW_H */
测试代码 修改main.c 在main主函数中增加
irda_rae_test();
修改Makefile 增加
objs += sensors/irda/irda_raw.o
编译执行

一开始时间很长是因为一上电的时候高电平,值打印的特别大,说明有问题
irda中断函数中没有更新上一次的时间
/*更新时间*/ g_last_time = cur;
再次更新

时间和数据格式符合时序要求
第009节_HS0038红外线接收器的编程_解析数据
解析NEC格式的数据
创建irda_nec.c
NEC解析数据


对于NEC格式的脉冲,基本脉冲宽度是0.56ms = 562.5us = t
其它的脉冲都是这个的整数倍,需要控制脉冲在9ms范围,那么我们可以把这个作为其他脉冲的最大偏差值
9ms – 2/t < DURATION < 9ms + 2/t 得到判断最大偏差值公式
#include "irda_raw.h"
/*
* 从环型缓冲区中获得脉冲数据,
* 解析得出address, data
*/
/*持续时间*/
#define DURATION_BASE 563
#define DURATION_DELTA (DURATION_BASE/2)
/*低脉冲头信息*/
#define DURATION_HEAD_LOW (16*DURATION_BASE)
/*高脉冲头信息*/
#define DURATION_HEAD_HIGH (8*DURATION_BASE)
/*高脉冲重复码*/
#define DURATION_REPEAT_HIGH (4*DURATION_BASE)
/*低脉冲传输数据*/
#define DURATION_DATA_LOW (1*DURATION_BASE)
/*数据1高脉冲*/
#define DURATION_DATA1_HIGH (3*DURATION_BASE)
/*数据0高脉冲*/
#define DURATION_DATA0_HIGH (1*DURATION_BASE)
/*低脉冲结束码*/
#define DURATION_END_LOW (1*DURATION_BASE)
static int duration_in_margin(int duration, int us)
{
if ((duration > (us - DURATION_DELTA)) && (duration < us + DURATION_DELTA))
return 1;
else
return 0;
}
/*
* 返回值: 0-得到数据, 1-得到重复码, -1 : 失败
*/
int irda_nec_read(int *address, int *data)
{
irda_raw_event event;
int i;
unsigned int val = 0;
unsigned char byte[4];
while (1)
{
if (0 == ir_event_get(&event))
{
/* 解析数据 */
/* 1. 判断是否为9MS的低脉冲 */
if (event.pol == 0 && \
duration_in_margin(event.duration, DURATION_HEAD_LOW))
{
/* 进行后续判断 */
/* 2. 读下一个高脉冲数据 */
if (0 == ir_event_get_timeout(&event, 10000))
{
/* 3. 判断它是否4.5ms的高脉冲
* 或者 2.25ms的高脉冲
*/
if (event.pol == 1 && \
duration_in_margin(event.duration, DURATION_HEAD_HIGH))
{
/* 4.5ms的高脉冲 */
/* 4. 重复解析32位数据 */
for (i = 0; i < 32; i++)
{
/* 5. 读0.56ms的低脉冲 */
if (0 == ir_event_get_timeout(&event, 10000))
{
if (event.pol == 0 && \
duration_in_margin(event.duration, DURATION_DATA_LOW))
{
/* 6. 读下一个数据, 判断它是 0.56ms/1.68ms的高脉冲 */
if (0 == ir_event_get_timeout(&event, 10000))
{
if (event.pol == 1 && \
duration_in_margin(event.duration, DURATION_DATA1_HIGH))
{
/* 得到了bit 1 */
val |= (1<<i);
}
else if (event.pol == 1 && \
duration_in_margin(event.duration, DURATION_DATA0_HIGH))
{
/* 得到了bit 0 */
}
else
{
printf("%s %d\n\r", __FUNCTION__, __LINE__);
return -1;
}
}
else
{
printf("%s %d\n\r", __FUNCTION__, __LINE__);
return -1;
}
}
else
{
printf("%s %d\n\r", __FUNCTION__, __LINE__);
return -1;
}
}
else
{
printf("%s %d\n\r", __FUNCTION__, __LINE__);
return -1;
}
}
/* 7. 得到了32位数据, 判断数据是否正确 */
byte[0] = val & 0xff;
byte[1] = (val>>8) & 0xff;
byte[2] = (val>>16) & 0xff;
byte[3] = (val>>24) & 0xff;
//printf("get data: %x %x %x %x\n\r", byte[0], byte[1], byte[2], byte[3]);
byte[1] = ~byte[1];
byte[3] = ~byte[3];
if (byte[0] != byte[1])
{
/* 有些遥控器不完全遵守NEC规范 */
//printf("%s %d\n\r", __FUNCTION__, __LINE__);
//return -1;
}
if (byte[2] != byte[3])
{
printf("%s %d\n\r", __FUNCTION__, __LINE__);
return -1;
}
*address = byte[0];
*data = byte[2];
return 0;
}
else if (event.pol == 1 && \
duration_in_margin(event.duration, DURATION_REPEAT_HIGH))
{
/* 2.25ms的高脉冲 */
return 1; /* 重复码 */
}
else
{
printf("%s %d\n\r", __FUNCTION__, __LINE__);
return -1; /* 错误 */
}
}
}
else
{
//printf("%s %d\n\r", __FUNCTION__, __LINE__);
return -1; /* 有效数据未开始 */
}
}
}
}
void irda_nec_test(void)
{
int address;
int data;
int ret;
irda_init();
while (1)
{
ret = irda_nec_read(&address, &data);
if (ret == 0)
{ /*输出地址和数据*/
printf("irda_nec_read: address = 0x%x, data = 0x%x\n\r", address, data);
}
else if (ret == 1)
{
printf("irda_nec_read: repeat code\n\r");
}
}
}